


Tác giả: 0xjacobzhao | https://linktr.ee/0xjacobzhao
Báo cáo nghiên cứu độc lập này được hỗ trợ bởi IOSG Ventures . Tác giả xin chân thành cảm ơn Hans (RoboCup Châu Á - Thái Bình Dương), Nichanan Kesonpat (1kx), Robert Koschig (1kx), Amanda Young (Collab+Currency). , Jonathan Victor (Ansa Research), Lex Sokolin (Generative Ventures), Jay Yu (Pantera Capital), Jeffrey Hu (Hashkey Capital) vì những bình luận quý báu của họ, cũng như những đóng góp mang tính xây dựng từ các cộng tác viên từ OpenMind , BitRobot , peaq , Auki Labs, XMAQUINA , GAIB, Vader, Gradient, Tashi Network và CodecFlow . Mặc dù chúng tôi đã nỗ lực hết sức để đảm bảo tính khách quan và chính xác, một số ý kiến vẫn mang tính chủ quan, và chúng tôi khuyến khích độc giả tham gia đóng góp ý kiến một cách nghiêm túc.
I. Robot: Từ tự động hóa công nghiệp đến trí tuệ nhân tạo
Ngành công nghiệp robot truyền thống đã phát triển một chuỗi giá trị tích hợp theo chiều dọc, bao gồm bốn lớp chính: linh kiện cốt lõi , hệ thống điều khiển , máy móc hoàn chỉnh và tích hợp hệ thống & ứng dụng .
- Các thành phần cốt lõi (bộ điều khiển, servo, bộ giảm tốc, cảm biến, pin, v.v.) có rào cản kỹ thuật cao nhất, xác định cả giới hạn hiệu suất và giới hạn chi phí.
- Hệ thống điều khiển hoạt động như “bộ não và tiểu não” của robot, chịu trách nhiệm đưa ra quyết định và lập kế hoạch chuyển động.
- Sản xuất máy móc hoàn chỉnh phản ánh khả năng tích hợp chuỗi cung ứng phức tạp.
- Việc tích hợp hệ thống và phát triển ứng dụng quyết định chiều sâu của thương mại hóa và đang trở thành nguồn tạo ra giá trị chính.
Trên toàn cầu, ngành robot đang phát triển theo một quỹ đạo rõ ràng — từ tự động hóa công nghiệp → trí thông minh theo tình huống cụ thể → trí thông minh đa năng — hình thành năm loại chính: robot công nghiệp, robot di động, robot dịch vụ, robot chuyên dụng và robot hình người.
- Robot công nghiệp: Hiện là phân khúc duy nhất đã hoàn thiện, robot công nghiệp được triển khai rộng rãi trong các quy trình hàn, lắp ráp, sơn và xử lý trên khắp các dây chuyền sản xuất. Ngành công nghiệp này có chuỗi cung ứng được tiêu chuẩn hóa, biên lợi nhuận ổn định và ROI được xác định rõ ràng. Trong danh mục này, robot cộng tác (cobot) được thiết kế để đảm bảo sự cộng tác an toàn giữa người và robot, vận hành nhẹ nhàng và triển khai nhanh chóng.
Các công ty tiêu biểu: ABB, Fanuc, Yaskawa, KUKA, Universal Robots, JAKA và AUBO - Robot di động: Bao gồm AGV (Xe tự hành dẫn đường) và AMR (Robot di động tự hành) , danh mục này được ứng dụng rộng rãi trong hậu cần, hoàn thiện đơn hàng thương mại điện tử và vận chuyển nhà máy. Đây là phân khúc phát triển nhất cho các ứng dụng B2B.
Các công ty tiêu biểu: Amazon Robotics, Geek+, Quicktron, Locus Robotics. - Robot dịch vụ: Nhắm mục tiêu vào các lĩnh vực tiêu dùng và thương mại — chẳng hạn như vệ sinh, dịch vụ ăn uống và giáo dục — đây là danh mục tăng trưởng nhanh nhất trong lĩnh vực tiêu dùng. Robot vệ sinh hiện nay tuân theo logic điện tử tiêu dùng, trong khi robot y tế và giao hàng đang nhanh chóng được thương mại hóa. Một làn sóng robot mới mang tính tổng quát hơn (ví dụ: hệ thống hai cánh tay như Dyna) đang nổi lên — linh hoạt hơn các sản phẩm chuyên biệt cho từng nhiệm vụ, nhưng vẫn chưa tổng quát như robot hình người. Các công ty tiêu biểu: Ecovacs, Roborock, Pudu Robotics, KEENON Robotics, iRobot, Dyna.
- Robot chuyên dụng: Được thiết kế cho các ứng dụng rủi ro cao hoặc chuyên biệt — chăm sóc sức khỏe, quân sự, xây dựng, hàng hải và hàng không vũ trụ — những robot này phục vụ các thị trường nhỏ nhưng có lợi nhuận với rào cản gia nhập lớn, thường dựa vào hợp đồng của chính phủ hoặc doanh nghiệp.
Các công ty tiêu biểu: Intuitive Surgical, Boston Dynamics, ANYbotics, NASA Valkyrie, Honeybee Robotics - Robot hình người: Được coi là “nền tảng lao động toàn cầu” trong tương lai, robot hình người đang thu hút nhiều sự chú ý nhất ở ranh giới của trí thông minh thể chất.
Các công ty tiêu biểu: Tesla (Optimus), Figure AI (Figure 01), Sanctuary AI (Phoenix), Agility Robotics (Digit), Apptronik (Apollo), 1X Robotics, Neura Robotics, Unitree, UBTECH, Agibot
Giá trị cốt lõi của robot hình người nằm ở hình thái giống người, cho phép chúng hoạt động trong môi trường xã hội và vật lý hiện có mà không cần cải tạo cơ sở hạ tầng. Không giống như robot công nghiệp hướng đến hiệu suất tối đa, robot hình người nhấn mạnh khả năng thích ứng chung và khả năng chuyển giao nhiệm vụ , cho phép triển khai liền mạch trong nhà máy, nhà ở và không gian công cộng.
Hầu hết robot hình người vẫn đang trong giai đoạn trình diễn kỹ thuật , tập trung vào việc xác nhận khả năng cân bằng động , vận động và thao tác . Mặc dù việc triển khai hạn chế đã bắt đầu xuất hiện trong các nhà máy được kiểm soát chặt chẽ (ví dụ: Figure × BMW, Agility Digit), và các nhà cung cấp bổ sung như 1X dự kiến sẽ sớm được phân phối bắt đầu từ năm 2026, nhưng đây vẫn là những ứng dụng đơn nhiệm, phạm vi hẹp — chưa phải là sự tích hợp lao động đa năng thực sự. Việc thương mại hóa quy mô lớn có ý nghĩa vẫn còn nhiều năm nữa.
Các nút thắt cốt lõi trải dài qua nhiều lớp:
- Việc phối hợp đa DOF và cân bằng động thời gian thực vẫn còn nhiều thách thức;
- Năng lượng và độ bền bị hạn chế bởi mật độ pin và hiệu suất bộ truyền động;
- Các đường ống nhận thức-quyết định thường mất ổn định trong môi trường mở và không thể khái quát hóa;
- Một khoảng cách dữ liệu đáng kể hạn chế việc đào tạo các chính sách tổng quát;
- Chuyển giao chéo hiện vẫn chưa được giải quyết;
- Chuỗi cung ứng phần cứng và đường cong chi phí — đặc biệt là bên ngoài Trung Quốc — vẫn là những rào cản đáng kể, khiến việc triển khai trên quy mô lớn với chi phí thấp trở nên khó khăn.
Việc thương mại hóa robot hình người sẽ diễn ra theo ba giai đoạn: Demo-as-a-Service trong ngắn hạn, được thúc đẩy bởi các phi công và trợ cấp; Robotics-as-a-Service (RaaS) trong trung hạn, khi các hệ sinh thái nhiệm vụ và kỹ năng xuất hiện; và mô hình Đám mây Lao động trong dài hạn, nơi giá trị chuyển từ phần cứng sang phần mềm và các dịch vụ mạng. Nhìn chung, robot hình người đang bước vào một quá trình chuyển đổi quan trọng từ trình diễn sang tự học . Liệu ngành công nghiệp này có thể vượt qua những rào cản đan xen về kiểm soát, chi phí và trí tuệ hay không sẽ quyết định liệu trí tuệ nhân tạo có thực sự có thể trở thành một lực lượng kinh tế có thể mở rộng quy mô hay không.
II. AI × Robot: Bình minh của Kỷ nguyên Trí tuệ Nhân tạo
Tự động hóa truyền thống phụ thuộc rất nhiều vào logic được lập trình sẵn và kiến trúc điều khiển dựa trên đường ống — chẳng hạn như mô hình DSOP (nhận thức–lập kế hoạch–kiểm soát) — vốn chỉ hoạt động đáng tin cậy trong các môi trường có cấu trúc. Tuy nhiên, thế giới thực phức tạp và khó lường hơn nhiều. Thế hệ AI hiện thân mới tuân theo một mô hình hoàn toàn khác: tận dụng các mô hình lớn và học tập biểu diễn thống nhất để cung cấp cho robot khả năng tương tác đa cảnh nhằm hiểu, dự đoán và hành động . Trí tuệ hiện thân nhấn mạnh sự kết hợp động giữa cơ thể (phần cứng), não bộ (mô hình) và môi trường (tương tác) . Robot chỉ đơn thuần là phương tiện — trí tuệ mới là cốt lõi thực sự.
Trí tuệ nhân tạo (AI) thể hiện trí tuệ trong thế giới biểu tượng và ngôn ngữ — nó vượt trội trong việc hiểu ngôn ngữ và ngữ nghĩa. Ngược lại, AI thể hiện trí tuệ trong thế giới vật lý — nó làm chủ nhận thức và hành động. Hai yếu tố này tương ứng với "bộ não" và "cơ thể" của quá trình tiến hóa AI, tạo thành hai ranh giới song song nhưng hội tụ.
Theo quan điểm phân cấp trí tuệ, AI thể hiện là khả năng bậc cao hơn AI tạo sinh, nhưng độ trưởng thành của nó tụt hậu rất xa. Các trường LLM được hưởng lợi từ dữ liệu quy mô internet dồi dào và vòng lặp "dữ liệu → tính toán → triển khai" được xác định rõ ràng. Tuy nhiên, trí tuệ robot đòi hỏi dữ liệu mang tính vị kỷ, đa phương thức, dựa trên hành động — quỹ đạo điều khiển từ xa, video góc nhìn thứ nhất, bản đồ không gian, chuỗi thao tác — vốn không tồn tại theo mặc định và phải được tạo ra thông qua tương tác trong thế giới thực hoặc mô phỏng độ trung thực cao. Điều này làm cho dữ liệu trở nên khan hiếm hơn, tốn kém hơn và khó mở rộng hơn. Mặc dù dữ liệu mô phỏng và tổng hợp có ích, nhưng chúng không thể thay thế hoàn toàn trải nghiệm cảm biến vận động thực tế. Đây là lý do tại sao các công ty như Tesla và Figure phải vận hành các nhà máy điều khiển từ xa và tại sao các trang trại thu thập dữ liệu lại xuất hiện ở Đông Nam Á. Tóm lại, các trường LLM học hỏi từ dữ liệu hiện có; robot phải tự tạo ra dữ liệu của riêng mình thông qua tương tác vật lý.
Trong 5–10 năm tới, cả hai sẽ hội tụ sâu sắc thông qua các mô hình Tầm nhìn–Ngôn ngữ–Hành động (VLA) và kiến trúc Tác nhân hiện thân — LLM sẽ xử lý nhận thức và lập kế hoạch cấp cao , trong khi robot sẽ thực hiện các hành động trong thế giới thực , tạo thành một vòng lặp hai chiều giữa dữ liệu và hiện thân , do đó thúc đẩy AI từ trí thông minh ngôn ngữ hướng tới trí thông minh tổng quát thực sự (AGI) .
Nền tảng công nghệ cốt lõi của trí tuệ hiện thân
Trí tuệ nhân tạo hiện thân có thể được khái niệm hóa như một tập hợp trí thông minh từ dưới lên , bao gồm:
VLA (Hợp nhất nhận thức) , RL/IL/SSL (Học tập) , Sim2Real (Chuyển giao thực tế) , Mô hình thế giới (Mô hình hóa nhận thức) và Bầy đàn & Lý luận (Trí tuệ tập thể và Bộ nhớ) .
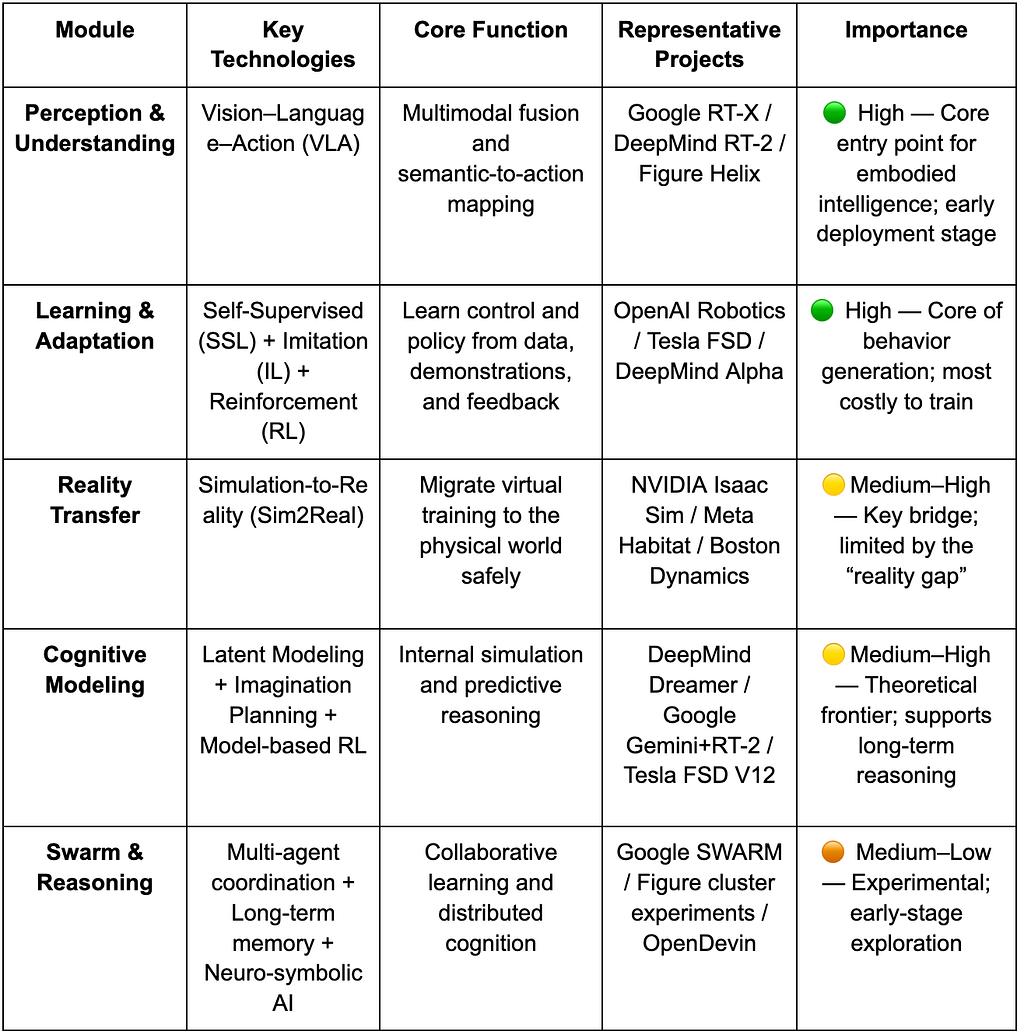
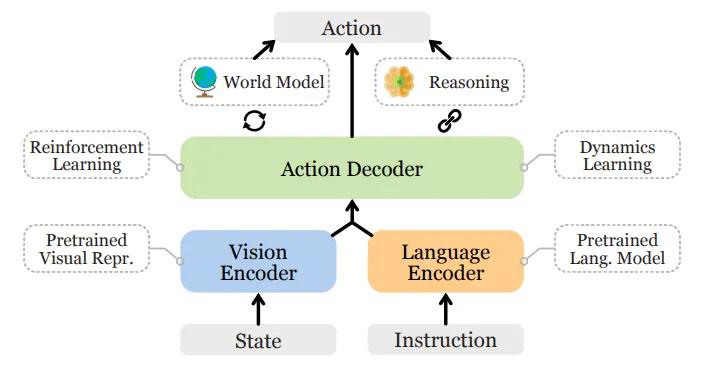
Nhận thức & Hiểu biết: Tầm nhìn–Ngôn ngữ–Hành động (VLA)
Mô hình VLA tích hợp Thị giác , Ngôn ngữ và Hành động vào một hệ thống đa phương thức thống nhất, cho phép robot hiểu các hướng dẫn của con người và chuyển đổi chúng thành các thao tác vật lý . Quy trình thực thi bao gồm phân tích ngữ nghĩa , phát hiện đối tượng , lập kế hoạch đường đi và thực thi hành động , hoàn thành vòng lặp đầy đủ "hiểu ngữ nghĩa → nhận thức thế giới → hoàn thành nhiệm vụ". Các dự án tiêu biểu: Google RT-X, Meta Ego-Exo và Figure Helix, thể hiện những đột phá trong hiểu biết đa phương thức, nhận thức nhập vai và điều khiển dựa trên ngôn ngữ.
Hệ thống VLA vẫn đang trong giai đoạn đầu và phải đối mặt với bốn trở ngại cơ bản:
- Sự mơ hồ về mặt ngữ nghĩa và khả năng khái quát nhiệm vụ yếu: các mô hình gặp khó khăn trong việc diễn giải các hướng dẫn mơ hồ hoặc mở;
- Sự liên kết giữa tầm nhìn và hành động không ổn định: các lỗi nhận thức được khuếch đại trong quá trình lập kế hoạch và thực hiện;
- Dữ liệu đa phương thức thưa thớt và không chuẩn hóa: việc thu thập và chú thích vẫn tốn kém, khiến việc xây dựng các bánh đà dữ liệu quy mô lớn trở nên khó khăn;
- Những thách thức về đường chân trời dài trên các trục thời gian và không gian: đường chân trời thời gian dài gây áp lực lên việc lập kế hoạch và trí nhớ, trong khi đường chân trời không gian lớn đòi hỏi phải suy luận về các yếu tố ngoài nhận thức — điều mà các VLA hiện tại còn thiếu do các mô hình thế giới và suy luận xuyên không gian còn hạn chế.
Những vấn đề này cùng nhau hạn chế khả năng khái quát hóa theo nhiều tình huống của VLA và hạn chế khả năng sẵn sàng triển khai trên quy mô lớn trong thế giới thực.
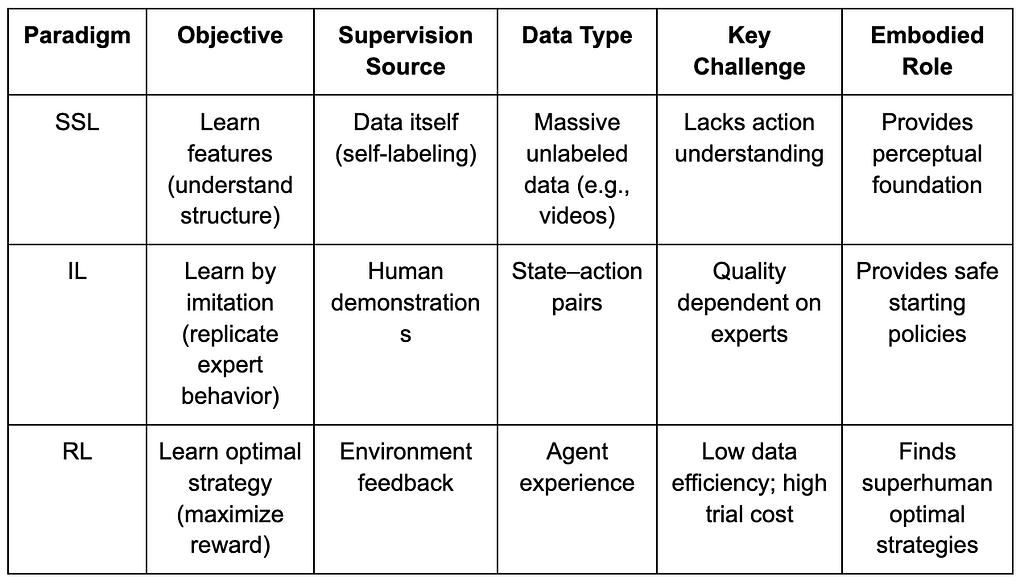
Học tập và thích nghi: SSL, IL và RL
- Học tự giám sát (SSL): Cho phép robot suy ra các mẫu hình và quy luật vật lý trực tiếp từ dữ liệu nhận thức — dạy chúng cách “ hiểu thế giới ”.
- Học bắt chước (IL): Cho phép robot bắt chước các cuộc trình diễn của con người hoặc chuyên gia — giúp chúng “ hành động giống con người ”.
- Học tăng cường (RL): Sử dụng vòng phản hồi thưởng-phạt để tối ưu hóa các chính sách — giúp chúng “ học thông qua thử nghiệm và sai sót ”.
Trong AI thể hiện, các mô hình này tạo thành một hệ thống học tập nhiều lớp : SSL cung cấp nền tảng biểu diễn , IL cung cấp các tiên nghiệm của con người và RL thúc đẩy tối ưu hóa chính sách ,
cùng nhau hình thành cơ chế cốt lõi của việc học từ nhận thức đến hành động .
Sim2Real: Kết nối mô phỏng và thực tế
Mô phỏng-thực tế (Sim2Real) cho phép robot được huấn luyện trong môi trường ảo trước khi triển khai trong thế giới thực. Các nền tảng như NVIDIA Isaac Sim , Omniverse và DeepMind MuJoCo tạo ra lượng lớn dữ liệu tổng hợp — giảm chi phí và hao mòn phần cứng.
Mục tiêu là giảm thiểu “khoảng cách thực tế” thông qua:
- Ngẫu nhiên hóa miền: Thay đổi ngẫu nhiên ánh sáng, ma sát và tiếng ồn để cải thiện khả năng khái quát hóa.
- Hiệu chuẩn vật lý: Sử dụng dữ liệu cảm biến thực để điều chỉnh vật lý mô phỏng cho chân thực.
- Tinh chỉnh thích ứng: Đào tạo lại nhanh chóng tại chỗ để đảm bảo tính ổn định trong môi trường thực tế.
Sim2Real tạo thành cầu nối trung tâm cho việc triển khai AI tích hợp. Mặc dù đã có những tiến bộ mạnh mẽ, vẫn còn nhiều thách thức xoay quanh khoảng cách thực tế , chi phí tính toán và an toàn trong thế giới thực . Tuy nhiên, Mô phỏng dưới dạng Dịch vụ (SimaaS) đang nổi lên như một cơ sở hạ tầng gọn nhẹ nhưng mang tính chiến lược cho kỷ nguyên AI tích hợp — thông qua các mô hình kinh doanh PaaS (Đăng ký Nền tảng) , DaaS (Tạo Dữ liệu) và VaaS (Xác thực) .
Mô hình nhận thức: Mô hình thế giới — “Thế giới bên trong” của Robot
Mô hình Thế giới đóng vai trò như bộ não bên trong của robot, cho phép chúng mô phỏng môi trường và kết quả bên trong — dự đoán và suy luận trước khi hành động. Bằng cách học hỏi động lực học môi trường, nó cho phép hành vi chủ động và dự đoán . Các dự án tiêu biểu: DeepMind Dreamer, Google Gemini + RT-2, Tesla FSD V12, NVIDIA WorldSim.
Các kỹ thuật cốt lõi bao gồm:
- Mô hình động lực học tiềm ẩn: Nén các quan sát có chiều cao thành các trạng thái tiềm ẩn.
- Lập kế hoạch dựa trên trí tưởng tượng: Thử nghiệm và sai sót ảo để dự đoán đường đi.
- Học tăng cường dựa trên mô hình: Thay thế các thử nghiệm thực tế bằng mô phỏng nội bộ.
Mô hình thế giới đánh dấu sự chuyển đổi từ trí tuệ phản ứng sang trí tuệ dự đoán , mặc dù vẫn còn những thách thức về độ phức tạp của mô hình , tính ổn định lâu dài và tiêu chuẩn hóa .
Trí tuệ và lý luận bầy đàn: Từ nhận thức cá nhân đến nhận thức tập thể
Hệ thống hợp tác đa tác nhân và hệ thống lý luận trí nhớ đại diện cho ranh giới tiếp theo — mở rộng trí thông minh từ các tác nhân riêng lẻ sang các tập thể hợp tác và nhận thức.
- Hệ thống đa tác nhân (MAS): Cho phép hợp tác phân tán giữa nhiều robot thông qua các khuôn khổ RL hợp tác (ví dụ: OpenAI Hide-and-Seek , DeepMind QMIX / MADDPG ). Những hệ thống này đã được chứng minh là hiệu quả trong hậu cần, kiểm tra và điều khiển bầy đàn phối hợp.
- Trí nhớ & Lý luận: Trang bị cho các tác nhân trí nhớ dài hạn và khả năng hiểu biết nhân quả — rất quan trọng cho việc khái quát hóa chéo nhiệm vụ và tự lập kế hoạch. Các ví dụ nghiên cứu bao gồm DeepMind Gato , Dreamer và Voyager , cho phép học tập liên tục và "ghi nhớ quá khứ, mô phỏng tương lai".
Cùng nhau, các thành phần này đặt nền móng cho robot có khả năng học tập tập thể, ghi nhớ và tự tiến hóa .
Bối cảnh AI hiện thân toàn cầu: Hợp tác và cạnh tranh

Ngành công nghiệp robot toàn cầu đang bước vào kỷ nguyên cạnh tranh hợp tác .
- Trung Quốc dẫn đầu về hiệu quả chuỗi cung ứng, sản xuất và tích hợp theo chiều dọc, với các công ty như Unitree và UBTECH đã sản xuất hàng loạt robot hình người. Tuy nhiên, năng lực thuật toán và mô phỏng của nước này vẫn còn kém Mỹ vài năm.
- Hoa Kỳ thống trị các mô hình và phần mềm AI tiên tiến (DeepMind, OpenAI, NVIDIA), nhưng lợi thế này không hoàn toàn mở rộng sang phần cứng robot — nơi các công ty Trung Quốc thường lặp lại nhanh hơn và thể hiện hiệu suất thực tế mạnh mẽ hơn. Khoảng cách phần cứng này phần nào giải thích cho những nỗ lực đưa sản xuất công nghiệp trở về nước của Hoa Kỳ theo Đạo luật CHIPS và Đạo luật IRA.
- Nhật Bản vẫn là quốc gia dẫn đầu thế giới về linh kiện chính xác và hệ thống điều khiển chuyển động, mặc dù tiến độ phát triển robot ứng dụng AI vẫn còn chậm.
- Hàn Quốc tạo nên sự khác biệt thông qua việc áp dụng robot tiêu dùng tiên tiến, được thúc đẩy bởi LG, NAVER Labs và hệ sinh thái robot dịch vụ trưởng thành.
- Châu Âu duy trì văn hóa kỹ thuật mạnh mẽ, tiêu chuẩn an toàn và chiều sâu nghiên cứu; trong khi phần lớn hoạt động sản xuất đã chuyển ra nước ngoài, Châu Âu vẫn tiếp tục vượt trội trong khuôn khổ hợp tác và tiêu chuẩn hóa robot.
Cùng nhau, những thế mạnh khu vực này đang định hình sự cân bằng lâu dài của ngành công nghiệp tình báo toàn cầu .
III. Robot × AI × Web3: Tầm nhìn tường thuật so với Con đường thực tế
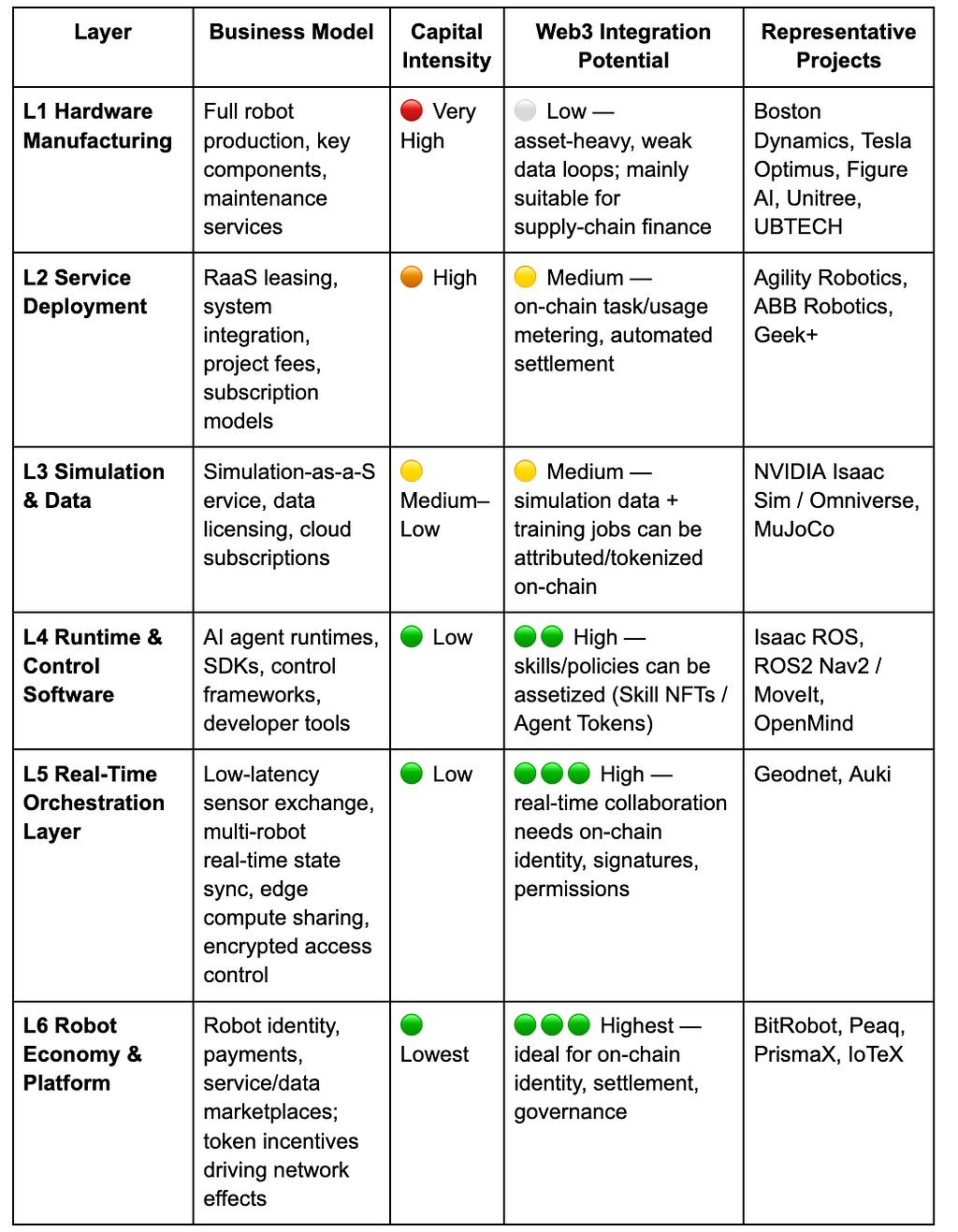
Năm 2025, một câu chuyện mới đã xuất hiện trên Web3 xoay quanh sự kết hợp giữa robot và AI. Mặc dù Web3 thường được coi là giao thức cơ sở cho một nền kinh tế máy móc phi tập trung, nhưng giá trị tích hợp thực sự và tính khả thi của nó lại khác nhau đáng kể tùy theo từng lớp:
- Lớp sản xuất phần cứng và dịch vụ: Đòi hỏi nhiều vốn với bánh đà dữ liệu yếu; Web3 hiện chỉ có thể đóng vai trò hỗ trợ trong các trường hợp ngoại lệ như tài chính chuỗi cung ứng hoặc cho thuê thiết bị.
- Hệ sinh thái mô phỏng và phần mềm: Khả năng tương thích cao hơn; dữ liệu mô phỏng và công việc đào tạo có thể được đưa lên chuỗi để phân bổ và các mô-đun tác nhân/kỹ năng có thể được tài sản hóa thông qua NFT hoặc Mã thông báo tác nhân.
- Lớp nền tảng: Mạng lưới lao động và cộng tác phi tập trung cho thấy tiềm năng lớn nhất — Web3 có thể hợp nhất danh tính, động cơ và quản trị để dần dần xây dựng một “thị trường lao động máy móc” đáng tin cậy, đặt nền tảng thể chế cho nền kinh tế máy móc trong tương lai.
Tầm nhìn dài hạn. Lớp Orchestration và Platform là hướng đi giá trị nhất để tích hợp Web3 với robot và AI. Khi robot có được khả năng nhận thức, ngôn ngữ và học hỏi, chúng đang tiến hóa thành những tác nhân thông minh có thể tự động quyết định, hợp tác và tạo ra giá trị kinh tế. Để những "người lao động thông minh" này thực sự tham gia vào nền kinh tế, bốn rào cản cốt lõi cần được giải quyết: danh tính, niềm tin, động lực và quản trị .
- Nhận dạng: Máy móc cần có danh tính kỹ thuật số có thể truy xuất nguồn gốc và quy kết. Với DID của máy móc , mỗi robot, cảm biến hoặc UAV có thể tạo ra một "thẻ ID" duy nhất có thể xác minh trên chuỗi, ràng buộc quyền sở hữu, nhật ký hoạt động và phạm vi quyền để cho phép tương tác an toàn và trách nhiệm giải trình.
- Niềm tin: “Lao động máy móc” phải có thể xác minh, đo lường và định giá được. Sử dụng hợp đồng thông minh , oracle và kiểm toán — kết hợp với Bằng chứng công việc thực tế (PoPW) , Môi trường thực thi đáng tin cậy (TEE) và Bằng chứng không kiến thức (ZKP) — việc thực thi tác vụ có thể được chứng minh là xác thực và có thể truy xuất nguồn gốc, mang lại giá trị kế toán cho hành vi máy móc.
- Ưu đãi: Web3 cho phép tự động thanh toán và luân chuyển giá trị giữa các máy thông qua các ưu đãi token , trừu tượng hóa tài khoản và kênh trạng thái . Robot có thể sử dụng các khoản thanh toán nhỏ để thuê máy tính và chia sẻ dữ liệu, với cơ chế đặt cược/chặt chém để đảm bảo hiệu suất; hợp đồng thông minh và oracle có thể điều phối một thị trường điều phối máy móc phi tập trung với sự điều phối tối thiểu của con người.
- Quản trị: Khi máy móc đạt được quyền tự chủ lâu dài, Web3 cung cấp khả năng quản trị minh bạch, có thể lập trình: DAO đồng quyết định các tham số hệ thống; đa chữ ký và danh tiếng duy trì sự an toàn và trật tự. Theo thời gian, điều này hướng tới quản trị thuật toán — con người đặt ra mục tiêu và giới hạn, trong khi hợp đồng làm trung gian cho các khuyến khích và kiểm tra giữa máy với máy.
Tầm nhìn cuối cùng của Web3 × Robotics : một mạng lưới đánh giá thực tế — đội tàu robot phân tán hoạt động như "công cụ suy luận thế giới vật lý" để liên tục kiểm tra và đánh giá hiệu suất mô hình trên nhiều môi trường phức tạp và đa dạng; và lực lượng lao động robot — robot thực hiện các nhiệm vụ vật lý có thể xác minh trên toàn thế giới, thanh toán thu nhập trên chuỗi và tái đầu tư giá trị vào việc nâng cấp phần cứng hoặc tính toán.
Con đường thực dụng ngày nay. Sự kết hợp giữa trí tuệ hiện thân và Web3 vẫn còn ở giai đoạn đầu; nền kinh tế trí tuệ máy móc phi tập trung chủ yếu dựa trên câu chuyện và cộng đồng. Những giao điểm khả thi trong tương lai gần tập trung vào ba lĩnh vực:
- Thu thập dữ liệu cộng đồng và phân bổ dữ liệu — các ưu đãi trên chuỗi và khả năng truy xuất nguồn gốc khuyến khích những người đóng góp tải lên dữ liệu thực tế.
- Sự tham gia toàn cầu dài hạn — các khoản thanh toán nhỏ và các ưu đãi nhỏ xuyên biên giới giúp giảm chi phí thu thập và phân phối dữ liệu.
- Tài chính hóa & đổi mới hợp tác — Cấu trúc DAO có thể cho phép tài sản hóa robot, mã hóa doanh thu và thanh toán giữa máy với máy.
Nhìn chung, việc tích hợp robot và Web3 sẽ diễn ra theo từng giai đoạn: trong ngắn hạn , trọng tâm sẽ là thu thập dữ liệu và cơ chế khuyến khích; trong trung hạn , dự kiến sẽ có những đột phá trong thanh toán dựa trên stablecoin, tổng hợp dữ liệu đuôi dài và tài sản hóa và thanh toán các mô hình RaaS; và trong dài hạn , khi robot hình người mở rộng quy mô, Web3 có thể phát triển thành nền tảng thể chế cho quyền sở hữu máy móc, phân phối doanh thu và quản trị, cho phép một nền kinh tế máy móc thực sự phi tập trung.
IV. Bối cảnh Robot Web3 & Các trường hợp được tuyển chọn
Dựa trên ba tiêu chí — tiến độ có thể kiểm chứng, tính minh bạch về mặt kỹ thuật và tính liên quan đến ngành — phần này lập bản đồ các dự án tiêu biểu tại giao điểm của Web3 × Robotics , được tổ chức thành năm lớp: Mô hình & Trí tuệ , Kinh tế Máy móc , Thu thập Dữ liệu , Cơ sở hạ tầng Nhận thức & Mô phỏng , và Tài sản & Năng suất Robot (RobotFi / RWAiFi) . Để đảm bảo tính khách quan, chúng tôi đã loại bỏ các dự án rõ ràng bị thổi phồng hoặc chưa được ghi chép đầy đủ; vui lòng chỉ ra bất kỳ thiếu sót nào.
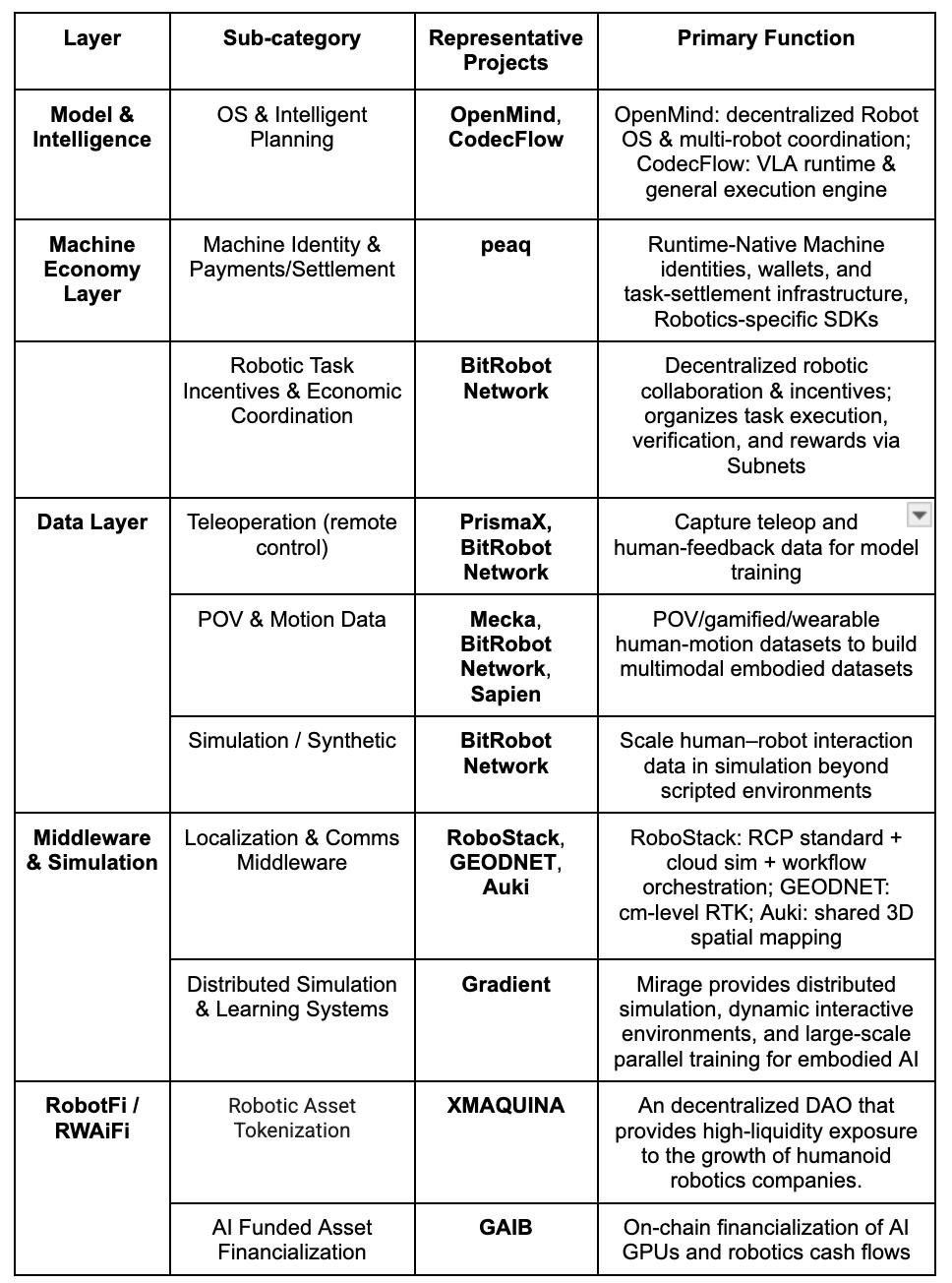
Lớp Mô hình & Trí tuệ
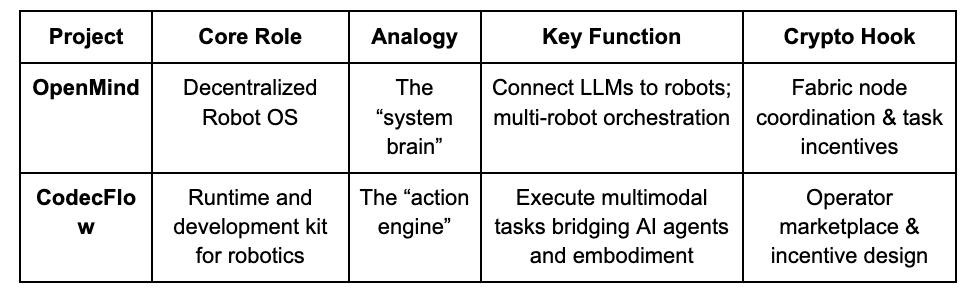
OpenMind — Xây dựng Android cho Robot ( https://openmind.org/ )
OpenMind là một hệ điều hành Robot mã nguồn mở dành cho AI và điều khiển tích hợp , nhằm mục đích xây dựng nền tảng phát triển và thời gian chạy phi tập trung đầu tiên cho robot. Hai thành phần cốt lõi:
- OM1: Lớp thời gian chạy tác nhân AI mã nguồn mở, dạng mô-đun được xây dựng trên ROS2, điều phối các quy trình nhận thức, lập kế hoạch và hành động cho cả robot kỹ thuật số và robot vật lý.
- FABRIC: Lớp phối hợp phân tán kết nối điện toán đám mây, mô hình và robot thực để các nhà phát triển có thể điều khiển/huấn luyện robot trong một môi trường thống nhất.
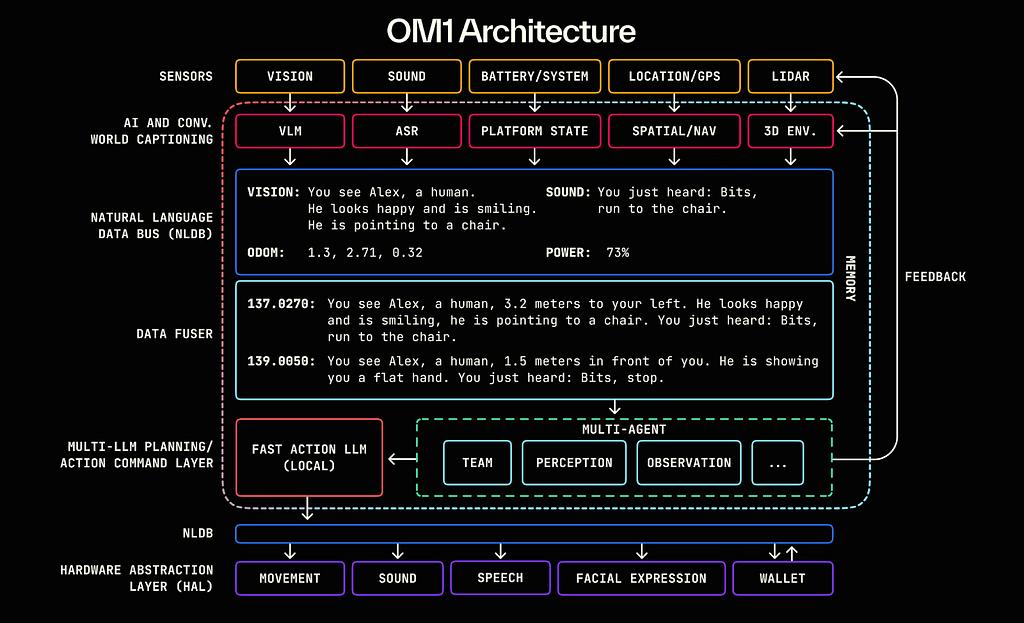
OpenMind hoạt động như một phần mềm trung gian thông minh giữa các chương trình LLM và thế giới robot — biến trí tuệ ngôn ngữ thành trí tuệ thực thể và cung cấp một nền tảng từ hiểu biết (Ngôn ngữ → Hành động) đến sự đồng bộ (Blockchain → Quy tắc) . Hệ thống đa lớp của nó tạo thành một vòng lặp cộng tác hoàn chỉnh: con người cung cấp phản hồi/gắn nhãn thông qua Ứng dụng OpenMind (dữ liệu RLHF); Mạng Fabric xử lý danh tính, phân bổ nhiệm vụ và thanh toán; robot OM1 thực hiện nhiệm vụ và tuân thủ "hiến pháp robot" trên chuỗi để kiểm tra hành vi và thanh toán — hoàn thành một chu trình phi tập trung từ phản hồi của con người → cộng tác nhiệm vụ → thanh toán trên chuỗi .
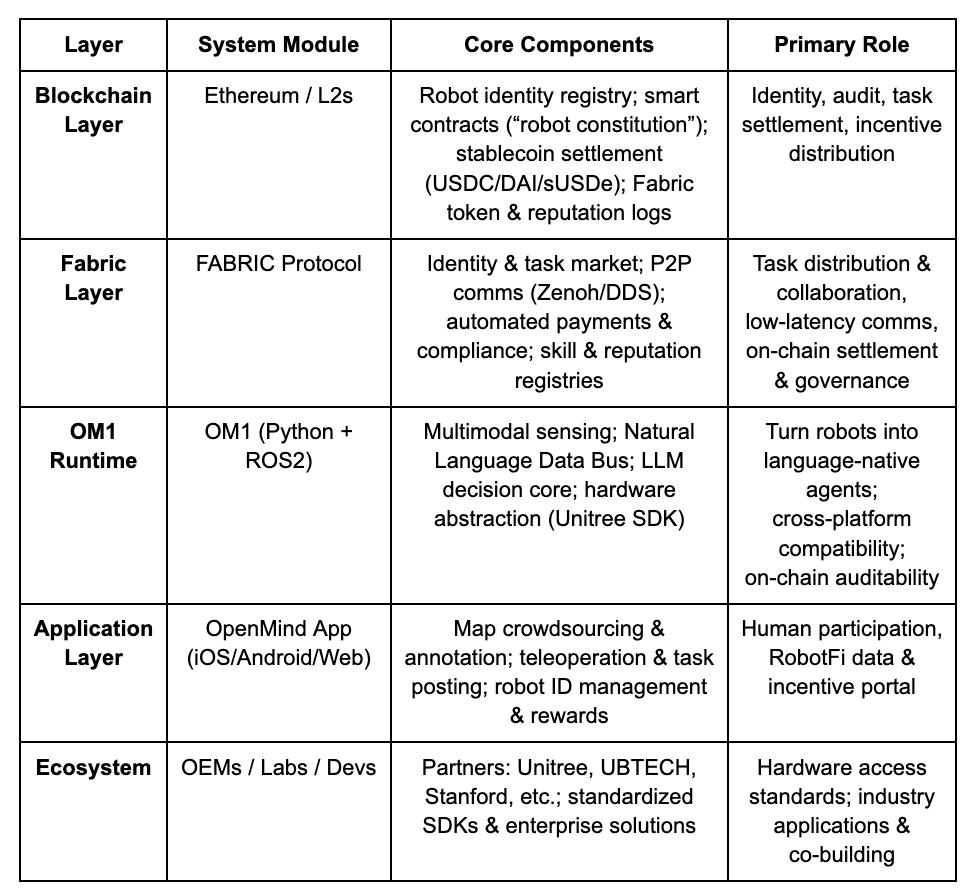
Tiến độ & Đánh giá. OpenMind đang trong giai đoạn đầu "hoạt động kỹ thuật, chưa được chứng minh về mặt thương mại" . OM1 Runtime được mã nguồn mở trên GitHub với các đầu vào đa phương thức và một bus dữ liệu NL để phân tích cú pháp ngôn ngữ thành hành động — nguyên bản nhưng đang thử nghiệm. Fabric và thanh toán trên chuỗi cho đến nay là các thiết kế ở cấp độ giao diện. Các mối quan hệ hệ sinh thái bao gồm Unitree, UBTECH, TurtleBot và các trường đại học (Stanford, Oxford, Seoul Robotics) cho giáo dục/nghiên cứu; chưa có triển khai công nghiệp. Ứng dụng đang trong giai đoạn beta; các ưu đãi/nhiệm vụ vẫn đang trong giai đoạn đầu.
Mô hình kinh doanh: OM1 (mã nguồn mở) + Fabric (thanh toán) + Skill Marketplace (khuyến khích). Chưa có doanh thu; dựa vào khoảng 20 triệu đô la tài trợ ban đầu (Pantera, Coinbase Ventures, DCG). Tham vọng về mặt kỹ thuật, lộ trình dài và phụ thuộc vào phần cứng; nếu Fabric thành công, nó có thể trở thành " Android của AI hiện thân ".
CodecFlow — Công cụ thực thi cho robot ( https://codecflow.ai )
CodecFlow là Lớp thực thi phi tập trung dành cho Robot trên Solana , cung cấp môi trường thời gian chạy theo yêu cầu cho các tác nhân AI và hệ thống robot — cung cấp cho mỗi tác nhân một “ Máy tức thời ”. Ba mô-đun:
- Fabric: Bộ tổng hợp tính toán đa đám mây và DePIN (Weaver + Shuttle + Gauge) giúp thiết lập các VM, vùng chứa GPU hoặc nút điều khiển robot an toàn chỉ trong vài giây.
- SDK optr: Một framework Python trừu tượng hóa các kết nối phần cứng, thuật toán đào tạo và tích hợp blockchain. Cho phép tạo ra các "Operator" điều khiển máy tính để bàn, mô phỏng hoặc robot thực.
- Ưu đãi mã thông báo: Ưu đãi trên chuỗi cho những người đóng góp mã nguồn mở, mua lại từ doanh thu và nền kinh tế tương lai cho thị trường
Mục tiêu: Thống nhất hệ sinh thái robot phân mảnh với một lớp thực thi duy nhất cung cấp cho các nhà xây dựng khả năng trừu tượng hóa phần cứng, các công cụ tinh chỉnh, cơ sở hạ tầng mô phỏng đám mây và kinh tế trên chuỗi để họ có thể khởi chạy và mở rộng các nhà điều hành tạo doanh thu cho robot và máy tính để bàn.
Tiến độ & Đánh giá. Fabric (Go) và SDK optr (Python) đã hoạt động; web/CLI có thể khởi chạy các phiên bản tính toán riêng biệt, tích hợp với NRN, ChainLink, peaq. Thị trường Vận hành (Operator Marketplace) dự kiến ra mắt vào cuối năm 2025, phục vụ các nhà phát triển AI, phòng thí nghiệm robot và nhà vận hành tự động hóa.
Lớp tiết kiệm máy móc
BitRobot — Phòng thí nghiệm Robot mở của thế giới (https://bitrobot.ai)
Mạng lưới nghiên cứu và cộng tác phi tập trung dành cho AI và robot hiện hữu, được đồng khởi xướng bởi FrodoBots Labs và Protocol Labs. Tầm nhìn: kiến trúc mở của Mạng con + Khuyến khích + Công việc robot có thể xác minh (VRW) .
- VRW: Xác định và xác minh sự đóng góp thực sự của từng nhiệm vụ robot.
- ENT (Embodied Node Token): Nhận dạng robot trên chuỗi và trách nhiệm giải trình về kinh tế.
- Mạng con: Tổ chức cộng tác liên vùng trên khắp các bộ phận nghiên cứu, tính toán, thiết bị và nhà điều hành.
- Senate + Gandalf AI: Quản trị chung giữa con người và AI để khuyến khích và phân bổ nghiên cứu.
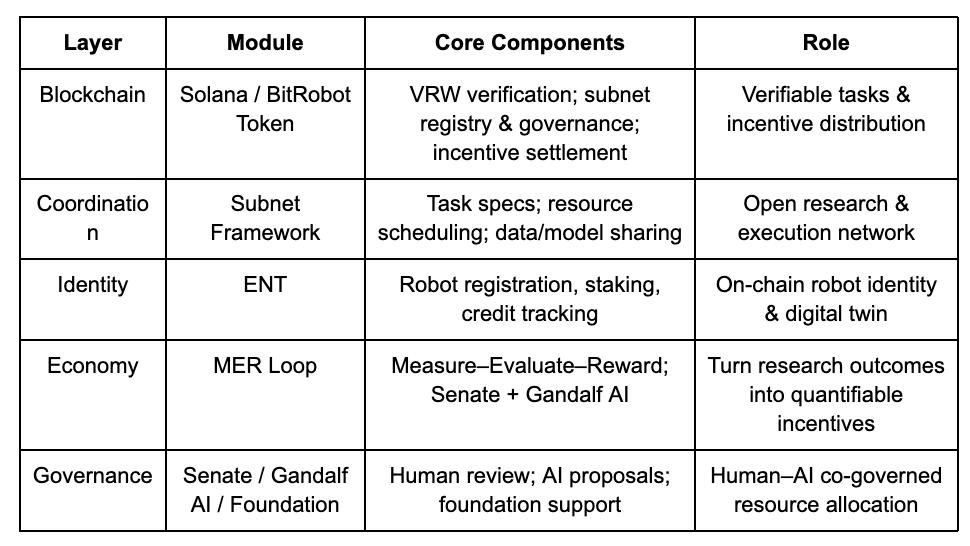
Kể từ sách trắng năm 2025, BitRobot đã chạy nhiều mạng con (ví dụ: SN/01 ET Fugi , SN/05 SeeSaw của Virtuals ), cho phép điều khiển từ xa phi tập trung và thu thập dữ liệu thực tế, đồng thời ra mắt quỹ Grand Challenges trị giá 5 triệu đô la để thúc đẩy nghiên cứu toàn cầu về phát triển mô hình.
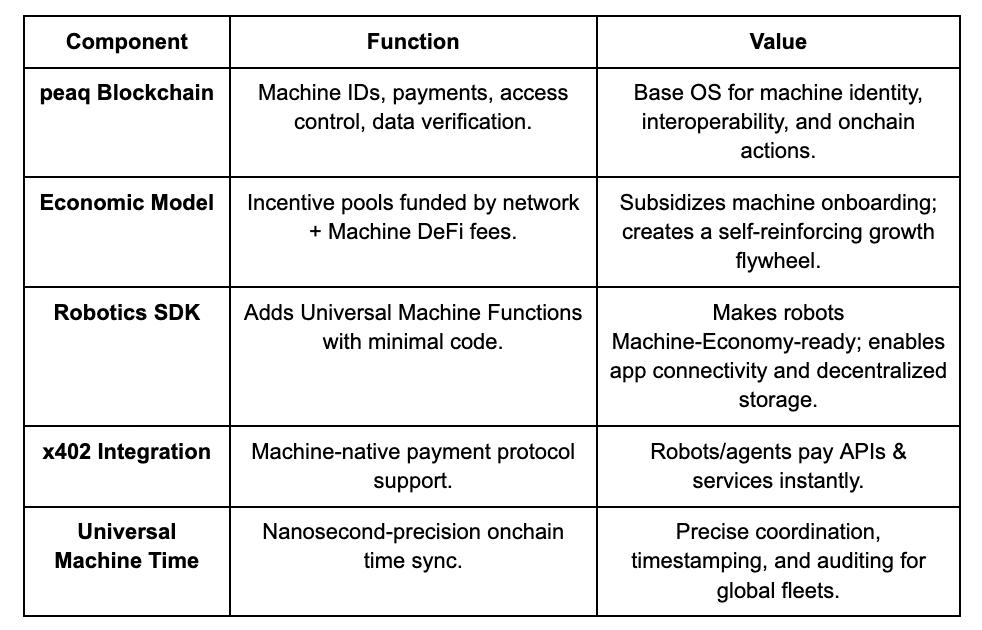
peaq — Nền kinh tế máy tính (https://www.peaq.xyz/)
peaq là một chuỗi Lớp 1 được xây dựng cho Nền Kinh tế Máy móc, cung cấp danh tính máy móc, ví, kiểm soát truy cập và đồng bộ hóa thời gian (Universal Machine Time) cho hàng triệu robot và thiết bị. Bộ công cụ phát triển phần mềm Robotics SDK của peaq cho phép các nhà phát triển tạo ra robot "sẵn sàng cho Nền Kinh tế Máy móc" chỉ với vài dòng mã, cho phép tương tác ngang hàng và không phụ thuộc vào nhà cung cấp.
Mạng lưới này hiện đang lưu trữ trang trại robot được mã hóa đầu tiên trên thế giới và hơn 60 ứng dụng máy móc thực tế. Khung mã hóa của Peaq cho phép các công ty robot huy động thanh khoản cho phần cứng đòi hỏi nhiều vốn và mở rộng sự tham gia ra ngoài các mô hình B2B/B2C truyền thống. Các quỹ khuyến khích cấp giao thức của Peaq, được tài trợ bởi phí mạng lưới, trợ cấp cho việc tích hợp máy móc và hỗ trợ các nhà phát triển — tạo ra động lực tăng trưởng cho các dự án robot.
Lớp dữ liệu
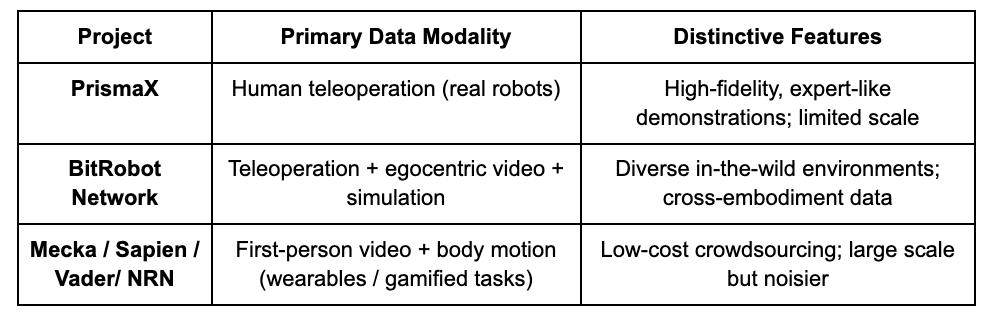
Mục đích: mở khóa dữ liệu thực tế khan hiếm và tốn kém để đào tạo thực tế thông qua điều khiển từ xa (PrismaX, BitRobot Network) , góc nhìn thứ nhất và ghi hình chuyển động (Mecka, BitRobot Network, Sapien、Vader、NRN) và quy trình mô phỏng/tổng hợp (BitRobot Network) để xây dựng các tập đoàn đào tạo có khả năng mở rộng và tổng quát hóa.
Lưu ý: Web3 không tạo ra dữ liệu tốt hơn những gã khổng lồ Web2; giá trị của nó nằm ở việc phân phối lại kinh tế dữ liệu. Với stablecoin rails + crowdsourcing , các ưu đãi không cần cấp phép và phân bổ trên chuỗi cho phép thanh toán vi mô, truy xuất nguồn gốc và chia sẻ doanh thu tự động với chi phí thấp. Mô hình crowdsourcing mở vẫn đang gặp phải những hạn chế về kiểm soát chất lượng và nhu cầu của người mua .
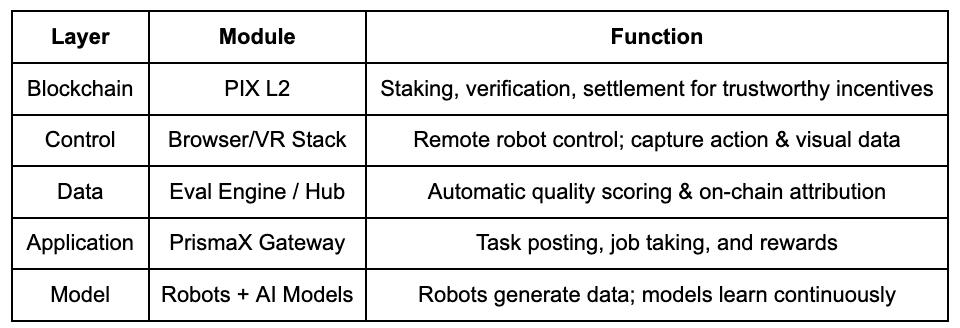
PrismaX ( https://gateway.prismax.ai )
Nền kinh tế dữ liệu và điều khiển từ xa phi tập trung dành cho AI hiện hữu — hướng tới xây dựng thị trường lao động robot toàn cầu , nơi con người, robot và mô hình AI cùng phát triển thông qua các ưu đãi trên chuỗi.
- Teleoperation Stack: Trình duyệt/VR UI + SDK kết nối các robot vũ khí/dịch vụ toàn cầu để điều khiển và thu thập dữ liệu theo thời gian thực.
- Công cụ đánh giá: CLIP + DINOv2 + tính điểm ngữ nghĩa dòng quang học để phân loại từng quỹ đạo và ổn định trên chuỗi.
Hoàn thành vòng lặp teleop → thu thập dữ liệu → đào tạo mô hình → thanh toán trên chuỗi , biến sức lao động của con người thành tài sản dữ liệu .
Tiến độ & Đánh giá. Mạng thử nghiệm đã hoạt động từ tháng 8 năm 2025 (gateway.prismax.ai). Người dùng có thể điều khiển cánh tay từ xa để thực hiện các nhiệm vụ cầm nắm và tạo dữ liệu huấn luyện. Eval Engine đang chạy nội bộ. Định vị rõ ràng và tính hoàn thiện kỹ thuật cao; ứng cử viên sáng giá cho giao thức dữ liệu và lao động phi tập trung trong kỷ nguyên hiện thân, nhưng quy mô ngắn hạn vẫn là một thách thức.
Mạng lưới BitRobot ( https://bitrobot.ai/ )
Các mạng con của Mạng BitRobot hỗ trợ thu thập dữ liệu qua video, điều khiển từ xa và mô phỏng. Với SN/01 ET Fugi, người dùng điều khiển robot từ xa để hoàn thành nhiệm vụ, thu thập dữ liệu định hướng và nhận thức trong một "trò chơi Pokemon Go ngoài đời thực". Trò chơi này đã dẫn đến việc tạo ra FrodoBots-2K , một trong những bộ dữ liệu định hướng người-robot mở lớn nhất, được UC Berkeley RAIL và Google DeepMind sử dụng. SN/05 SeeSaw thu thập dữ liệu video từ môi trường thực tế trên quy mô lớn thông qua iPhone. Các mạng con khác đã được công bố là RoboCap và Rayvo tập trung vào việc thu thập dữ liệu video theo hướng tự kỷ thông qua các hiện thân chi phí thấp.
Mecka ( https://www.mecka.ai )
Mecka là một công ty dữ liệu robot chuyên thu thập video, chuyển động và trình diễn nhiệm vụ mang tính tự đề cao — thông qua công nghệ ghi hình di động trò chơi và thiết bị phần cứng tùy chỉnh — để xây dựng các tập dữ liệu đa phương thức quy mô lớn phục vụ cho đào tạo AI tích hợp.
Sapien ( https://www.sapien.io/ )
Một nền tảng huy động cộng đồng dữ liệu chuyển động của con người để hỗ trợ trí tuệ robot. Thông qua thiết bị đeo và ứng dụng di động, Sapien thu thập dữ liệu tư thế và tương tác của con người để huấn luyện các mô hình thực thể — xây dựng một mạng lưới dữ liệu chuyển động toàn cầu.
Vader ( https://www.vaderai.ai )
Vader huy động cộng đồng thực hiện các video và bài trình diễn nhiệm vụ mang tính tự đề cao thông qua EgoPlay , một game MMO thực tế, nơi người dùng ghi lại các hoạt động hàng ngày từ góc nhìn thứ nhất và kiếm được $VADER. Kênh ORN của nó chuyển đổi cảnh quay POV thô thành các tập dữ liệu có cấu trúc, an toàn cho quyền riêng tư, được bổ sung nhãn hành động và tường thuật ngữ nghĩa — được tối ưu hóa cho việc đào tạo chính sách giống người.
Đại lý NRN ( https://www.nrnagents.ai/ )
Nền tảng dữ liệu RL được thể hiện bằng trò chơi, huy động nguồn lực cộng đồng cho các buổi trình diễn của con người thông qua điều khiển robot trên trình duyệt và các cuộc thi mô phỏng. NRN tạo ra các quỹ đạo hành vi dài hạn cho việc học bắt chước và RL liên tục, sử dụng các tác vụ giống như thể thao làm dữ liệu nguyên thủy có thể mở rộng để đào tạo chính sách mô phỏng-thực tế.
Thu thập dữ liệu hiện thân — So sánh dự án
Phần mềm trung gian & Mô phỏng
Lớp Middleware & Simulation tạo thành xương sống giữa cảm biến vật lý và ra quyết định thông minh, bao gồm định vị, truyền thông, lập bản đồ không gian và mô phỏng quy mô lớn. Lĩnh vực này vẫn còn trong giai đoạn đầu: các dự án đang khám phá định vị chính xác cao, điện toán không gian chia sẻ, chuẩn hóa giao thức và mô phỏng phân tán, nhưng vẫn chưa có tiêu chuẩn thống nhất hoặc hệ sinh thái tương tác nào được hình thành.
Phần mềm trung gian và cơ sở hạ tầng không gian
Các khả năng cốt lõi của robot — định vị, định vị, kết nối và lập bản đồ không gian — tạo thành cầu nối giữa thế giới vật lý và quá trình ra quyết định thông minh. Mặc dù các dự án DePIN rộng hơn (Silencio, WeatherXM, DIMO) hiện nay đề cập đến "robot", các dự án dưới đây là những dự án có liên quan trực tiếp nhất đến AI hiện thân.
- RoboStack — Nền tảng vận hành robot đám mây ( https://robostack.io )
Hệ điều hành và ngăn xếp điều khiển robot gốc đám mây tích hợp ROS2 , DDS và điện toán biên . RCP (Giao thức Điều khiển Robot) của nó hướng đến mục tiêu giúp robot có thể gọi/điều khiển như các dịch vụ đám mây. - GEODNET — Mạng GNSS phi tập trung ( https://geodnet.com )
Mạng lưới định vị vệ tinh phi tập trung toàn cầu cung cấp RTK/GNSS ở cấp độ cm . Với các trạm gốc phân tán và các ưu đãi trên chuỗi, mạng lưới này cung cấp khả năng định vị chính xác cao cho máy bay không người lái, xe tự hành và robot — trở thành Lớp Hạ tầng Địa lý của nền kinh tế máy móc. - Auki - Posemesh cho tính toán không gian ( https://www.auki.com )
Mạng Posemesh phi tập trung tạo ra các bản đồ 3D thời gian thực được chia sẻ thông qua các cảm biến và máy tính cộng đồng, cho phép AR, điều hướng robot và cộng tác đa thiết bị — cơ sở hạ tầng quan trọng kết hợp AR × Robotics . - Tashi Network — Phối hợp lưới thời gian thực cho robot ( https://tashi.network )
Mạng lưới lưới phi tập trung cho phép đồng thuận dưới 30ms, trao đổi cảm biến độ trễ thấp và đồng bộ hóa trạng thái nhiều robot. Bộ công cụ phát triển phần mềm MeshNet của nó hỗ trợ SLAM chia sẻ, điều phối bầy đàn và cập nhật bản đồ mạnh mẽ cho AI tích hợp theo thời gian thực. - Staex — Kết nối phi tập trung & Đo từ xa ( https://www.staex.io )
Một lớp kết nối và quản lý thiết bị phi tập trung từ Deutsche Telekom R&D, cung cấp khả năng giao tiếp an toàn, đo từ xa đáng tin cậy và định tuyến từ thiết bị đến đám mây. Staex cho phép đội robot trao đổi dữ liệu đáng tin cậy và tương tác giữa các nhà khai thác.
Hệ thống mô phỏng và học tập phân tán
Gradient — Hướng tới trí tuệ mở (https://gradient.network/)
Gradient là một phòng thí nghiệm R&D AI chuyên xây dựng Trí tuệ Mở (Open Intelligence ), cho phép đào tạo phân tán, suy luận, xác minh và mô phỏng trên cơ sở hạ tầng phi tập trung. Nền tảng công nghệ hiện tại của phòng thí nghiệm bao gồm Parallax (suy luận phân tán), Echo (học tăng cường phân tán và đào tạo đa tác tử) và Gradient Cloud (giải pháp AI doanh nghiệp).
Trong lĩnh vực robot, Gradient đang phát triển Mirage — một nền tảng mô phỏng phân tán và học tập robot được thiết kế để xây dựng các mô hình thế giới tổng quát và các chính sách phổ quát, hỗ trợ môi trường tương tác động và đào tạo song song quy mô lớn. Mirage dự kiến sẽ sớm phát hành khuôn khổ và mô hình của mình, và nhóm đã thảo luận với NVIDIA về khả năng hợp tác tiềm năng.
Tài sản và lợi nhuận của Robot (RobotFi / RWAiFi)
Lớp này chuyển đổi robot từ công cụ sản xuất thành tài sản có thể tài chính hóa thông qua mã thông báo, phân phối doanh thu và quản trị phi tập trung , hình thành nên cơ sở hạ tầng tài chính của nền kinh tế máy móc.
XmaquinaDAO — DAO AI vật lý ( https://www.xmaquina.io )
XMAQUINA là một hệ sinh thái phi tập trung cung cấp khả năng tiếp cận toàn cầu, thanh khoản cao cho các công ty robot hình người và AI hiện thân tư nhân hàng đầu — mang đến những cơ hội vốn chỉ dành cho VC trên chuỗi khối. Token DEUS của hệ sinh thái này hoạt động như một chỉ số thanh khoản và tài sản quản trị, điều phối việc phân bổ ngân quỹ và tăng trưởng hệ sinh thái. Cổng thông tin DAO và Bệ phóng Kinh tế Máy móc cho phép cộng đồng đồng sở hữu và hỗ trợ các dự án AI Vật lý mới nổi thông qua tài sản máy móc được mã hóa và sự tham gia có cấu trúc trên chuỗi khối.
GAIB — Lớp kinh tế cho cơ sở hạ tầng AI ( https://gaib.ai/ )
GAIB cung cấp Lớp kinh tế thống nhất cho cơ sở hạ tầng AI thực tế như GPU và robot , kết nối vốn phi tập trung với tài sản cơ sở hạ tầng AI hiệu quả và giúp lợi nhuận có thể xác minh, kết hợp và trên chuỗi .
Đối với robot, GAIB không “bán token robot”. Thay vào đó, họ tài chính hóa thiết bị robot và hợp đồng vận hành (RaaS, thu thập dữ liệu, teleop) trên chuỗi — chuyển đổi dòng tiền thực tế → tài sản sinh lời trên chuỗi có thể cấu thành . Điều này bao gồm tài trợ thiết bị (cho thuê/thế chấp), dòng tiền vận hành (RaaS/dịch vụ dữ liệu) và doanh thu từ quyền dữ liệu (cấp phép/hợp đồng), giúp tài sản robot và thu nhập của chúng có thể đo lường được, định giá được và có thể giao dịch được .
GAIB sử dụng AID/sAID làm phương tiện thanh toán/lợi nhuận, được hỗ trợ bởi các biện pháp kiểm soát rủi ro có cấu trúc (thế chấp vượt mức, dự trữ, bảo hiểm). Theo thời gian, GAIB sẽ tích hợp với các sản phẩm phái sinh DeFi và thị trường thanh khoản để khép kín vòng lặp từ “tài sản robot” sang “tài sản lợi nhuận tổng hợp”. Mục tiêu: trở thành xương sống kinh tế của trí tuệ nhân tạo trong kỷ nguyên AI.

V. Kết luận: Những thách thức hiện tại và cơ hội dài hạn
Về lâu dài, sự hợp nhất của Robotics × AI × Web3 hướng đến việc xây dựng một nền kinh tế máy móc phi tập trung ( DeRobot Economy ), chuyển đổi trí tuệ nhân tạo từ “tự động hóa máy móc đơn lẻ” sang sự hợp tác mạng lưới có thể sở hữu, định giá và quản lý . Logic cốt lõi là một vòng lặp tự củng cố — “Token → Triển khai → Dữ liệu → Phân phối lại giá trị” — thông qua đó robot, cảm biến và nút tính toán giành được quyền sở hữu trên chuỗi, giao dịch và chia sẻ lợi nhuận.
Tuy nhiên, ở giai đoạn hiện tại, mô hình này vẫn đang trong giai đoạn thăm dò ban đầu , còn lâu mới đạt được dòng tiền ổn định và một bánh đà thương mại được mở rộng quy mô. Nhiều dự án được dẫn dắt bởi lý thuyết với việc triển khai thực tế còn hạn chế. Sản xuất và vận hành robot đòi hỏi nhiều vốn ; chỉ riêng các ưu đãi token không thể tài trợ cho việc mở rộng cơ sở hạ tầng. Mặc dù tài chính trên chuỗi có thể cấu thành, nhưng nó vẫn chưa giải quyết được vấn đề định giá rủi ro tài sản thực và hiện thực hóa dòng tiền. Tóm lại, "mạng lưới máy móc tự duy trì" vẫn còn lý tưởng , và mô hình kinh doanh của nó cần được xác thực trong thế giới thực.
- Lớp Mô hình & Trí tuệ. Đây là hướng đi dài hạn có giá trị nhất. Hệ điều hành robot nguồn mở, đại diện bởi OpenMind, tìm cách phá vỡ các hệ sinh thái khép kín và thống nhất việc phối hợp nhiều robot với giao diện ngôn ngữ-hành động. Tầm nhìn kỹ thuật rõ ràng và hoàn chỉnh về mặt hệ thống, nhưng gánh nặng kỹ thuật rất lớn , chu kỳ xác thực dài, và phản hồi tích cực ở cấp độ ngành vẫn chưa được hình thành .
- Lớp Kinh tế Máy móc. Vẫn chưa ra mắt thị trường : cơ sở robot trong thế giới thực còn nhỏ, và mạng lưới nhận dạng cộng với khuyến khích dựa trên DID đang gặp khó khăn trong việc hình thành một vòng lặp tự nhất quán. Chúng ta vẫn còn rất xa mới đạt được một "nền kinh tế lao động máy móc" thực sự. Chỉ sau khi các hệ thống hiện thân được triển khai trên quy mô lớn , hiệu quả kinh tế của mạng lưới nhận dạng, thanh toán và cộng tác trên chuỗi mới trở nên rõ ràng.
- Lớp Dữ liệu. Các rào cản tương đối thấp hơn — và điều này gần nhất với khả năng thương mại hóa hiện nay . Thu thập dữ liệu hiện hữu đòi hỏi tính liên tục về không gian và thời gian và ngữ nghĩa hành động có độ chính xác cao , những yếu tố quyết định chất lượng và khả năng tái sử dụng. Cân bằng quy mô đám đông với độ tin cậy của dữ liệu là thách thức cốt lõi. PrismaX cung cấp một khuôn mẫu có thể sao chép một phần bằng cách khóa nhu cầu phía B trước , sau đó phân phối các tác vụ thu thập/xác thực, nhưng quy mô hệ sinh thái và thị trường dữ liệu sẽ cần thời gian để hoàn thiện.
- Lớp Middleware & Simulation. Vẫn đang trong quá trình xác thực kỹ thuật , chưa có tiêu chuẩn thống nhất và khả năng tương tác hạn chế. Đầu ra mô phỏng khó chuẩn hóa để chuyển giao trong thế giới thực; hiệu quả của Sim2Real vẫn còn hạn chế.
- Lớp RobotFi / RWAiFi. Vai trò của Web3 chủ yếu là hỗ trợ — tăng cường tính minh bạch, hiệu quả thanh toán và tài chính trong tài chính chuỗi cung ứng, cho thuê thiết bị và quản trị đầu tư, thay vì định nghĩa lại nền kinh tế robot.
Mặc dù vậy, chúng tôi tin rằng sự giao thoa giữa Robot × AI × Web3 đánh dấu điểm khởi đầu của hệ thống kinh tế thông minh tiếp theo . Nó không chỉ là sự hợp nhất của các mô hình kỹ thuật; mà còn là cơ hội để đúc lại các mối quan hệ sản xuất . Khi máy móc sở hữu bản sắc, động cơ và khả năng quản trị , sự hợp tác giữa người và máy có thể phát triển từ tự động hóa cục bộ sang tự chủ mạng lưới . Trong ngắn hạn, lĩnh vực này sẽ vẫn được thúc đẩy bởi các câu chuyện và thử nghiệm , nhưng các khuôn khổ thể chế và động cơ mới nổi đang đặt nền móng cho trật tự kinh tế của một xã hội máy móc trong tương lai. Về lâu dài, việc kết hợp trí thông minh hiện thân với Web3 sẽ vẽ lại ranh giới của việc tạo ra giá trị — nâng cao các tác nhân thông minh thành các tác nhân kinh tế có thể sở hữu, hợp tác và tạo ra doanh thu .
Tuyên bố miễn trừ trách nhiệm: Bài viết này được hỗ trợ bởi các công cụ AI (ChatGPT-5 và Deepseek). Tác giả đã nỗ lực hiệu đính và đảm bảo tính chính xác, nhưng vẫn có thể còn sai sót. Lưu ý rằng thị trường tài sản tiền điện tử thường thể hiện sự phân kỳ giữa các yếu tố cơ bản của dự án và diễn biến giá trên thị trường thứ cấp. Nội dung này chỉ nhằm mục đích tổng hợp thông tin và trao đổi học thuật/nghiên cứu , và không cấu thành lời khuyên đầu tư hoặc khuyến nghị mua hoặc bán bất kỳ token nào.
Sự phát triển hội tụ của tự động hóa, AI và Web3 trong ngành công nghiệp robot ban đầu được xuất bản trên IOSG Ventures trên Medium, nơi mọi người tiếp tục cuộc trò chuyện bằng cách làm nổi bật và phản hồi câu chuyện này.


