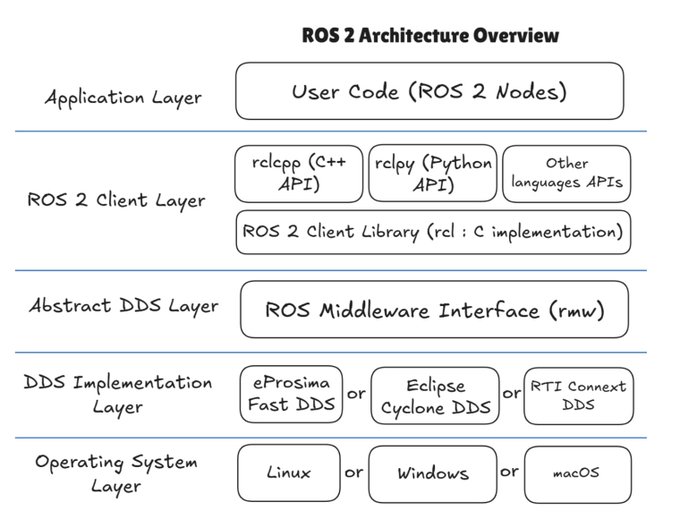
ROS 2 (ROS 2) 简介 ROS 2 是用于构建机器人软件的中间件。它负责处理进程间的消息传递、节点发现和数据序列化——作为基础架构层,您无需自行编写 TCP 套接字。 与 ROS 1 的主要区别是什么?ROS 1 使用自定义 TCP 协议。ROS 2 使用 DDS(数据分发服务)——一种支持 QoS 策略、安全性和确定性通信时序的标准。 工厂机械臂需要保证 1 毫秒的响应时间。ROS 1 无法做到这一点,而 ROS 2 可以。 它与其他方案有何不同? 与编写自定义代码相比:ROS 2 开箱即用,提供发布/订阅、服务调用、参数服务器和生命周期管理等功能。自行开发这些功能需要团队花费 6-12 个月的时间。 与专有框架(例如 ABB RobotStudio、KUKA KRL)相比:ROS 2 与硬件无关。同一套代码可以在不同品牌的机器人上运行。 您可能知道以下这些已经在使用 ROS 2 的大型企业: ➤ 博世:仓库机器人(已部署 2000 多台); ➤ NASA:VIPER 月球车; ➤ Tier IV:Autoware 自动驾驶技术栈(用于日本的量产车); ➤ 亚马逊:部分 Proteus 仓库机器人; ➤ 宝马、丰田:研发和生产线自动化。 根据 Open Robotics 对 3,500 名开发者的调查,在工业环境中,ROS 1 到 ROS 2 的采用率在 2019 年至 2024 年间增长了 3 倍。
本文为机器翻译
展示原文
来自推特
免责声明:以上内容仅为作者观点,不代表Followin的任何立场,不构成与Followin相关的任何投资建议。
喜欢
收藏
评论
分享