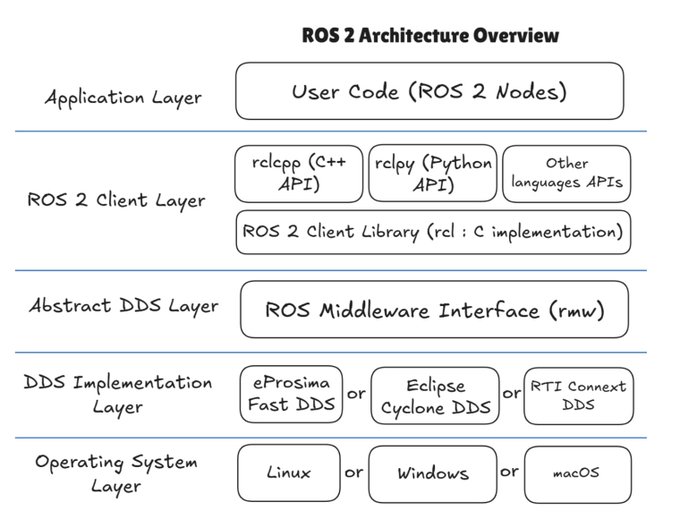
ROS 2 (ROS 2) 簡介 ROS 2 是用於構建機器人軟件的中間件。它負責處理進程間的消息傳遞、節點發現和數據序列化——作為基礎架構層,您無需自行編寫 TCP 套接字。 與 ROS 1 的主要區別是什麼?ROS 1 使用自定義 TCP 協議。ROS 2 使用 DDS(數據分發服務)——一種支持 QoS 策略、安全性和確定性通信時序的標準。 工廠機械臂需要保證 1 毫秒的響應時間。ROS 1 無法做到這一點,而 ROS 2 可以。 它與其他方案有何不同? 與編寫自定義代碼相比:ROS 2 開箱即用,提供發佈/訂閱、服務調用、參數服務器和生命週期管理等功能。自行開發這些功能需要團隊花費 6-12 個月的時間。 與專有框架(例如 ABB RobotStudio、KUKA KRL)相比:ROS 2 與硬件無關。同一套代碼可以在不同品牌的機器人上運行。 您可能知道以下這些已經在使用 ROS 2 的大型企業: ➤ 博世:倉庫機器人(已部署 2000 多臺); ➤ NASA:VIPER 月球車; ➤ Tier IV:Autoware 自動駕駛技術棧(用於日本的量產車); ➤ 亞馬遜:部分 Proteus 倉庫機器人; ➤ 寶馬、豐田:研發和生產線自動化。 根據 Open Robotics 對 3,500 名開發者的調查,在工業環境中,ROS 1 到 ROS 2 的採用率在 2019 年至 2024 年間增長了 3 倍。
本文為機器翻譯
展示原文
來自推特
免責聲明:以上內容僅為作者觀點,不代表Followin的任何立場,不構成與Followin相關的任何投資建議。
喜歡
收藏
評論
分享