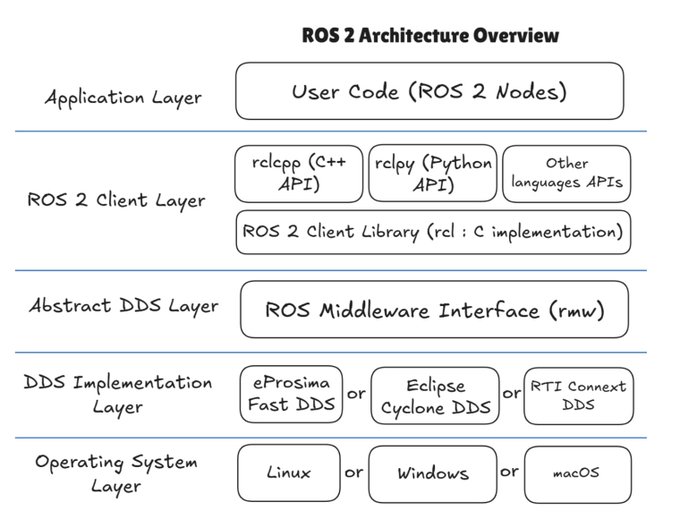
ROS 2 (로봇 운영 시스템 2) 개요 ROS 2는 로봇 소프트웨어 개발을 위한 미들웨어입니다. 프로세스 간 메시지 전달, 노드 검색, 데이터 직렬화 등 인프라 계층을 처리하므로 TCP 소켓을 직접 작성할 필요가 없습니다. ROS 1과의 주요 차이점은 무엇일까요? ROS 1은 사용자 정의 TCP 프로토콜을 사용했지만, ROS 2는 QoS 정책, 보안, 결정론적 통신 타이밍을 지원하는 표준인 DDS(데이터 분산 서비스)를 사용합니다. 공장 로봇 팔은 1ms의 응답 시간을 보장해야 합니다. ROS 1은 이를 보장할 수 없었지만, ROS 2는 가능합니다. 다른 대안들과의 차이점은 무엇일까요? 커스텀 코드 작성 대비: ROS 2는 발행/구독(pub/sub), 서비스 호출, 파라미터 서버, 라이프사이클 관리 기능을 기본적으로 제공합니다. 이러한 기능을 직접 구축하려면 팀 단위로 6~12개월이 소요됩니다. 독점 프레임워크(ABB RobotStudio, KUKA KRL 등) 대비: ROS 2는 하드웨어에 구애받지 않습니다. 동일한 코드가 다양한 로봇 브랜드에서 실행됩니다. ROS 2를 이미 사용하고 있는 주요 기업들은 다음과 같습니다. ➤ Bosch: 창고 로봇(2,000대 이상 배치); ➤ NASA: VIPER 달 탐사 로버; ➤ Tier IV: Autoware 자율 주행 스택(일본 생산 차량); ➤ Amazon: Proteus 창고 로봇 일부; ➤ BMW, Toyota: R&D 및 생산 라인 자동화. Open Robotics가 3,500명의 개발자를 대상으로 실시한 설문조사에 따르면, 산업 현장에서 ROS 1에서 ROS 2로의 도입률은 2019년부터 2024년까지 3배 증가했습니다.
이 기사는 기계로 번역되었습니다
원문 표시
Twitter에서
면책조항: 상기 내용은 작자의 개인적인 의견입니다. 따라서 이는 Followin의 입장과 무관하며 Followin과 관련된 어떠한 투자 제안도 구성하지 않습니다.
라이크
즐겨찾기에 추가
코멘트
공유