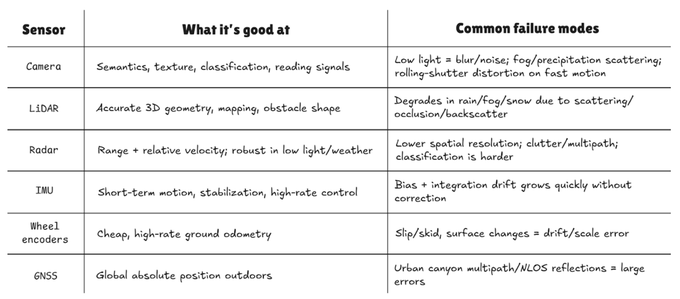
로봇 센서 심층 분석: 카메라 vs. 라이다 vs. 레이더 vs. IMU 로봇은 "세상을 직접 보는" 것이 아닙니다. 불완전한 측정값을 수집한 후, 안정적이고 안전한 상태를 유지하려고 노력합니다. 핵심은 각 센서가 예측 가능한 방식으로 고장난다는 점이며, 실제 로봇 배치에서는 하나의 센서가 고장나더라도 로봇 전체가 작동을 멈추지 않도록 시스템을 설계하는 것이 중요합니다. ➤ 카메라는 질감과 의미론적 정보(차선, 표지판, 객체 종류)를 파악하는 데 탁월하며 가격도 저렴합니다. 하지만 조명과 광학적 특성에 민감하다는 단점이 있습니다. 저조도 환경에서는 노출 시간이 길어지고 모션 블러가 발생하며, 빠른 움직임은 롤링 셔터 카메라의 경우 기하학적 왜곡을 유발하여 제대로 작동하지 않을 수 있습니다. 또한 광학 센서는 안개나 강수 환경에서 산란으로 인해 성능이 저하됩니다. ➤ 라이다(Light Detection and Ranging)는 카메라가 파악하기 어려운 정확한 3D 기하학적 구조와 크기 정보를 제공합니다. 그러나 라이다 역시 광학 센서이기 때문에 비, 안개, 눈이 내리면 역산란과 가림 현상이 발생하여 인식 품질이 저하될 수 있습니다. ➤ 레이더는 거리와 상대 속도를 정확하게 측정하는 "날씨 및 속도" 센서로, 일반적으로 광학 센서보다 저조도 및 악천후 환경에서 더 안정적이지만, 공간 해상도가 낮고 정밀한 분류가 어려울 수 있습니다. ➤ IMU(가속도계/자이로스코프)는 단기적인 움직임과 제어 안정성에 유용하지만, 순수 적분 방식은 노이즈와 느리게 변화하는 바이어스로 인해 드리프트가 빠르게 발생하므로 다른 센서로 보정해야 합니다. ➤ 휠 엔코더/주행거리계는 지상 로봇에 적합하고 측정 속도가 빠르지만, 미끄러짐/스키드 및 노면 변화로 인해 오차가 누적됩니다. ➤ GNSS는 실외에서 전역 위치를 제공하지만, 도심 협곡에서는 다중경로/비시선 반사로 인해 큰 오차가 발생할 수 있습니다.
이 기사는 기계로 번역되었습니다
원문 표시
섹터:
Twitter에서
면책조항: 상기 내용은 작자의 개인적인 의견입니다. 따라서 이는 Followin의 입장과 무관하며 Followin과 관련된 어떠한 투자 제안도 구성하지 않습니다.
라이크
즐겨찾기에 추가
코멘트
공유