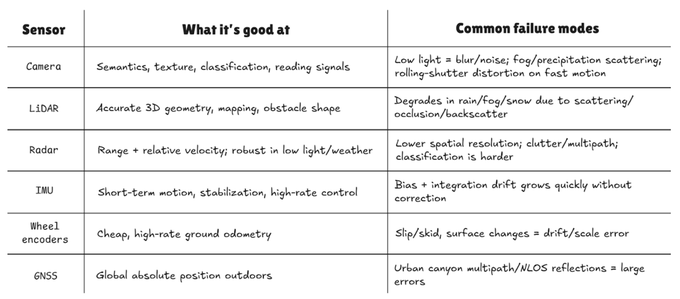
机器人传感器深度解析:摄像头 vs 激光雷达 vs 雷达 vs 惯性测量单元 (IMU) 机器人并非“看到世界”。它们收集的是不完美的测量数据,然后努力保持稳定和安全。关键在于,每个传感器的故障方式都是可预测的,而实际部署的关键在于设计系统,确保单个传感器的故障不会导致整个机器人失效。 ➤ 摄像头擅长纹理和语义信息(车道、标志、物体类别),而且价格低廉。但缺点是它们对光照和光学条件非常敏感。弱光会导致曝光时间延长,产生运动模糊;快速运动也会因几何畸变而损坏卷帘快门式摄像头。此外,由于散射作用,光学传感在雾/降水中也会降低性能。 ➤ 激光雷达 (LiDAR) 可以提供摄像头难以处理的精确三维几何形状和比例尺信息。但激光雷达仍然是光学传感器:雨/雾/雪会引入反向散射和遮挡,降低感知质量。 ➤ 雷达是一种“天气和速度”传感器,能够很好地测量距离和相对速度,并且在弱光和恶劣天气条件下通常比光学传感器更稳定,但其空间分辨率较低,难以进行精细分类。 ➤ 惯性测量单元(IMU,包括加速度计和陀螺仪)非常适合短期运动和控制稳定性,但由于噪声和缓慢变化的偏差,纯积分漂移会很快发生,因此必须由其他传感器进行校正。 ➤ 轮式编码器/里程计简单且适用于地面机器人,但打滑/侧滑和路面变化会导致累积误差。 ➤ 全球导航卫星系统(GNSS)可在室外提供全球定位信息,但在城市峡谷中,多径/非视距反射会造成较大的误差。
本文为机器翻译
展示原文
相关赛道:
来自推特
免责声明:以上内容仅为作者观点,不代表Followin的任何立场,不构成与Followin相关的任何投资建议。
喜欢
收藏
评论
分享