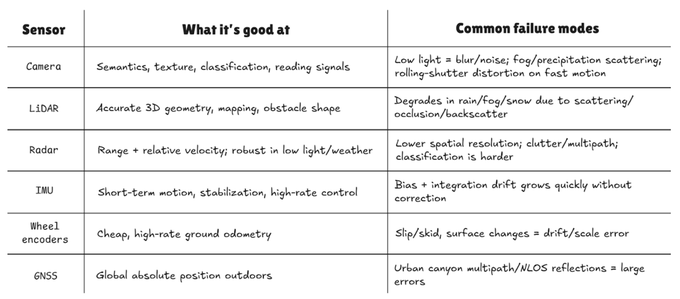
機器人傳感器深度解析:攝像頭 vs 激光雷達 vs 雷達 vs 慣性測量單元 (IMU) 機器人並非“看到世界”。它們收集的是不完美的測量數據,然後努力保持穩定和安全。關鍵在於,每個傳感器的故障方式都是可預測的,而實際部署的關鍵在於設計系統,確保單個傳感器的故障不會導致整個機器人失效。 ➤ 攝像頭擅長紋理和語義信息(車道、標誌、物體類別),而且價格低廉。但缺點是它們對光照和光學條件非常敏感。弱光會導致曝光時間延長,產生運動模糊;快速運動也會因幾何畸變而損壞捲簾快門式攝像頭。此外,由於散射作用,光學傳感在霧/降水中也會降低性能。 ➤ 激光雷達 (LiDAR) 可以提供攝像頭難以處理的精確三維幾何形狀和比例尺信息。但激光雷達仍然是光學傳感器:雨/霧/雪會引入反向散射和遮擋,降低感知質量。 ➤ 雷達是一種“天氣和速度”傳感器,能夠很好地測量距離和相對速度,並且在弱光和惡劣天氣條件下通常比光學傳感器更穩定,但其空間分辨率較低,難以進行精細分類。 ➤ 慣性測量單元(IMU,包括加速度計和陀螺儀)非常適合短期運動和控制穩定性,但由於噪聲和緩慢變化的偏差,純積分漂移會很快發生,因此必須由其他傳感器進行校正。 ➤ 輪式編碼器/里程計簡單且適用於地面機器人,但打滑/側滑和路面變化會導致累積誤差。 ➤ 全球導航衛星系統(GNSS)可在室外提供全球定位信息,但在城市峽谷中,多徑/非視距反射會造成較大的誤差。
本文為機器翻譯
展示原文
相关赛道:
來自推特
免責聲明:以上內容僅為作者觀點,不代表Followin的任何立場,不構成與Followin相關的任何投資建議。
喜歡
收藏
評論
分享