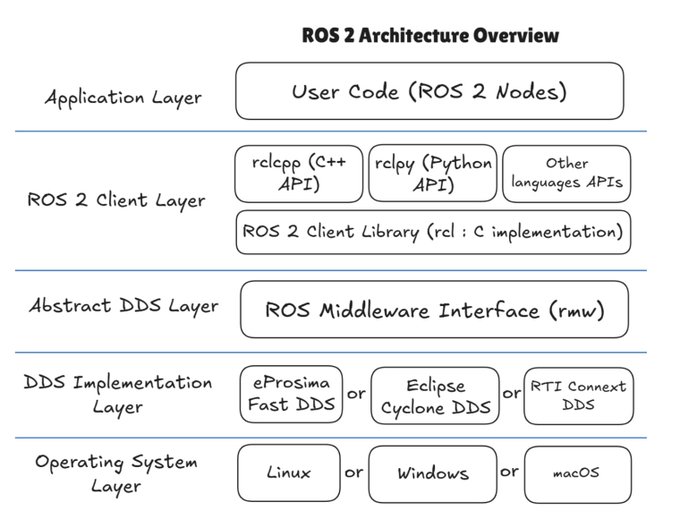
ROS 2 (Robot Operating System 2) ROS 2 là phần mềm trung gian để xây dựng phần mềm robot. Nó xử lý việc truyền thông điệp giữa các tiến trình, phát hiện nút và tuần tự hóa dữ liệu - lớp cơ sở hạ tầng để bạn không phải tự viết socket TCP. Điểm khác biệt chính so với ROS 1? ROS 1 sử dụng giao thức TCP tùy chỉnh. ROS 2 sử dụng DDS (Data Distribution Service) - một tiêu chuẩn hỗ trợ các chính sách QoS, bảo mật và thời gian giao tiếp xác định. Một cánh tay robot trong nhà máy cần thời gian phản hồi được đảm bảo là 1ms. ROS 1 không thể đảm bảo điều đó. ROS 2 thì có thể. Nó khác biệt như thế nào so với các giải pháp thay thế? So với việc tự viết mã: bạn có sẵn pub/sub, các lệnh gọi dịch vụ, máy chủ tham số, quản lý vòng đời. Việc xây dựng hệ thống này cần các nhóm từ 6-12 tháng. So với các framework độc quyền (ABB RobotStudio, KUKA KRL): ROS 2 không phụ thuộc vào phần cứng. Cùng một mã có thể chạy trên các thương hiệu robot khác nhau. Và bạn có thể biết những công ty lớn này đã sử dụng ROS 2: ➤ Bosch: robot kho hàng (hơn 2.000 đơn vị đã được triển khai); ➤ NASA: xe tự hành VIPER trên mặt trăng; ➤ Tier IV: hệ thống lái tự động Autoware (xe sản xuất tại Nhật Bản); ➤ Amazon: một số robot kho hàng Proteus; ➤ BMW, Toyota: R&D và tự động hóa dây chuyền sản xuất. Tỷ lệ áp dụng đã tăng gấp 3 lần từ ROS 1 lên ROS 2 trong môi trường công nghiệp (2019-2024), theo khảo sát của Open Robotics với 3.500 nhà phát triển.
Bài viết này được dịch máy
Xem bản gốc
Từ Twitter
Tuyên bố từ chối trách nhiệm: Nội dung trên chỉ là ý kiến của tác giả, không đại diện cho bất kỳ lập trường nào của Followin, không nhằm mục đích và sẽ không được hiểu hay hiểu là lời khuyên đầu tư từ Followin.
Thích
Thêm vào Yêu thích
Bình luận
Chia sẻ
Nội dung liên quan